
World domination is likely to be lead by bipedal general-AI robots, so we had a head start.
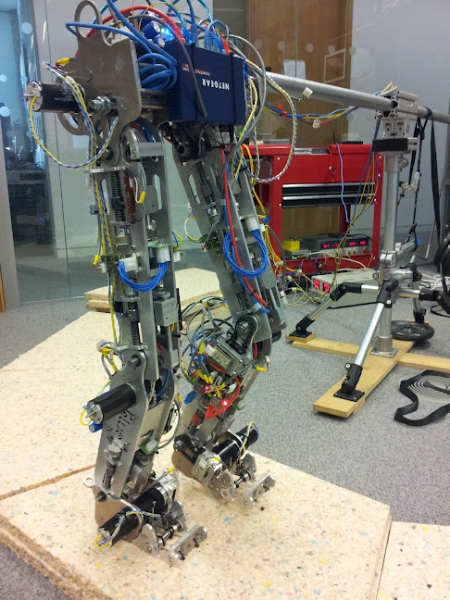
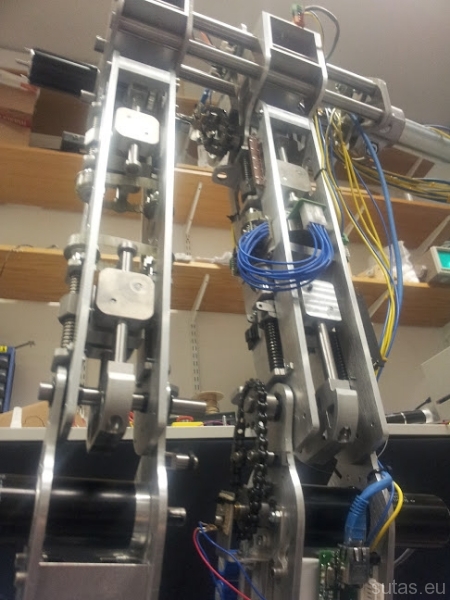
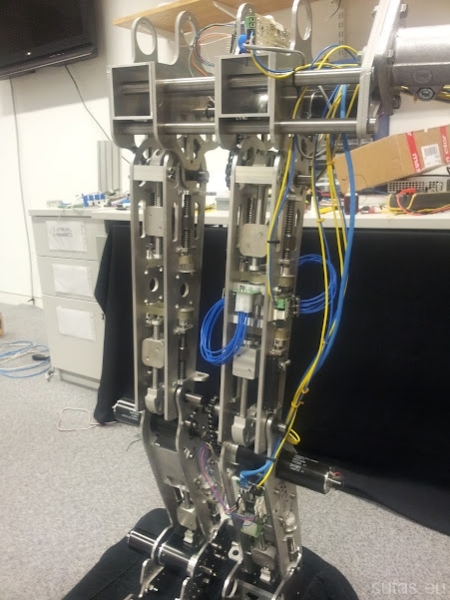
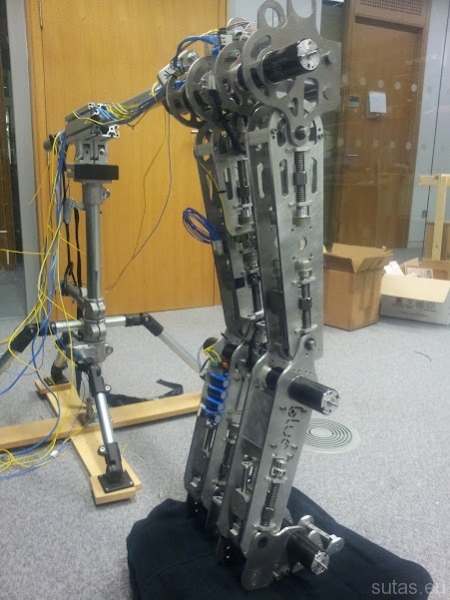
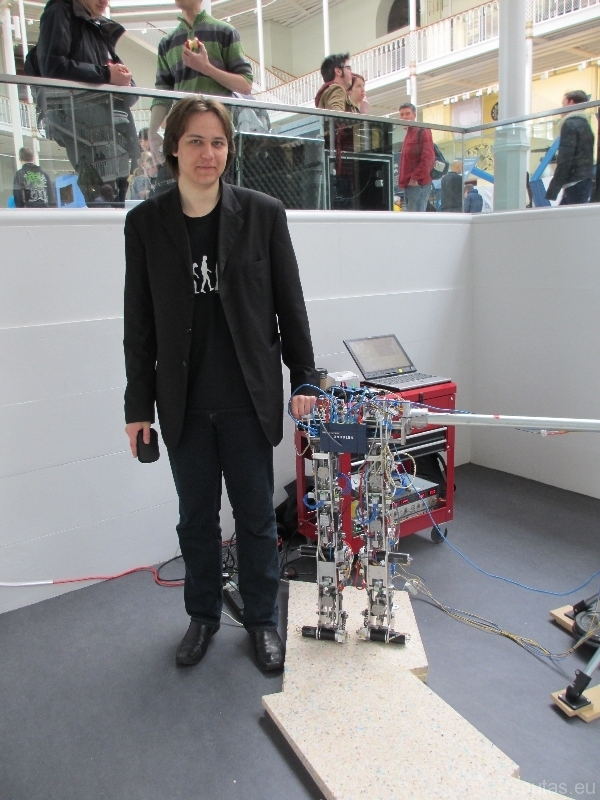
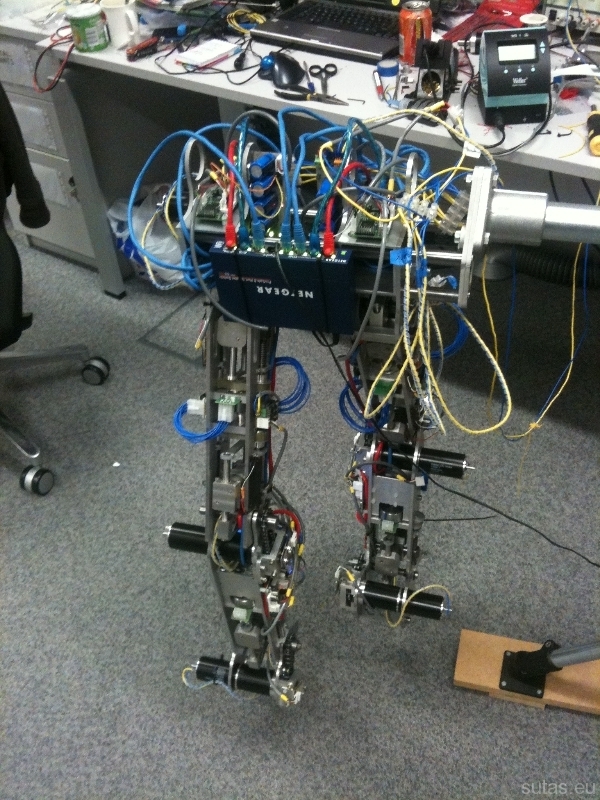
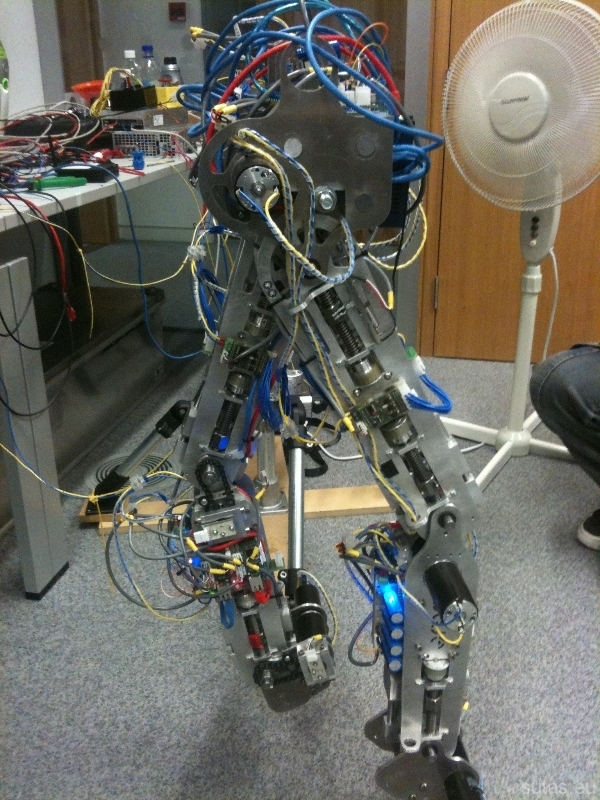
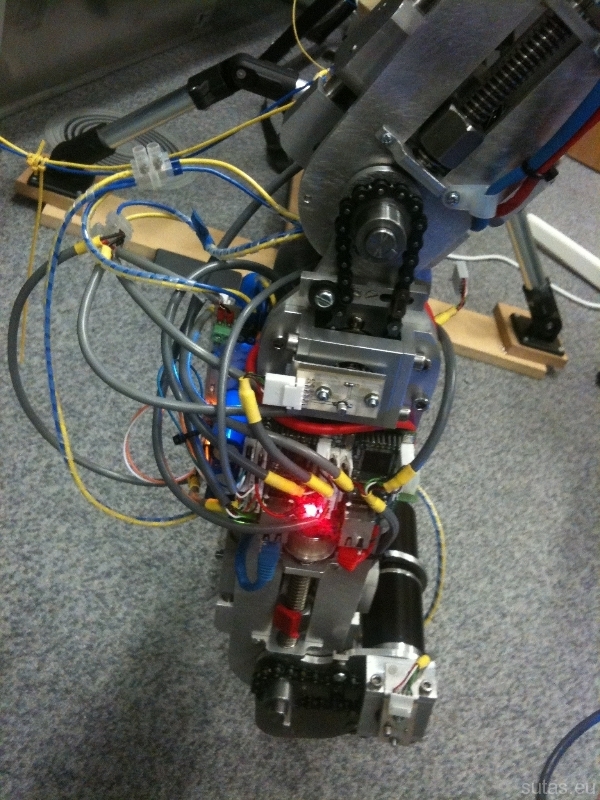
After the press release on 2012/04/03 I can finally share what I have been working on for a past ~year! Currently I am a 2nd year undergrad at the University of Edinburgh and due to right circumstances (thanks go to Prof. Sethu Vijayakumar) I was able to become a part of awesome project, BLUE (Bipedal Locomotion at the University of Edinburgh). BLUE is a new type of bipedal robot, in fact, first in the world, which can control the stiffness and damping of its joints independently. It is an Alexander Enoch’s PhD (University of Edinburgh) project.
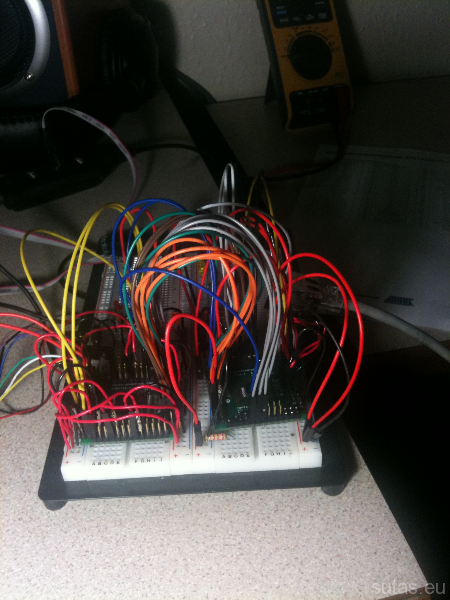
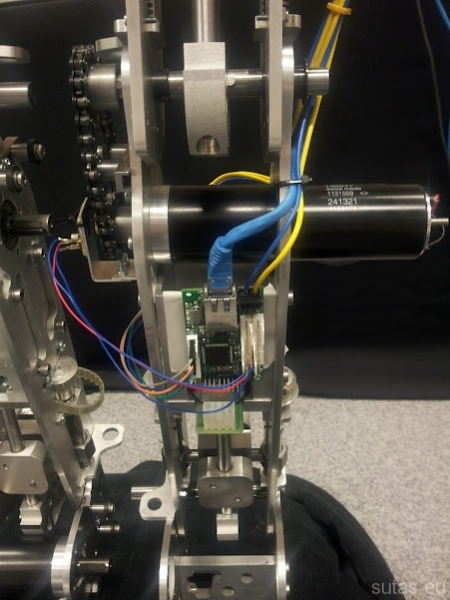
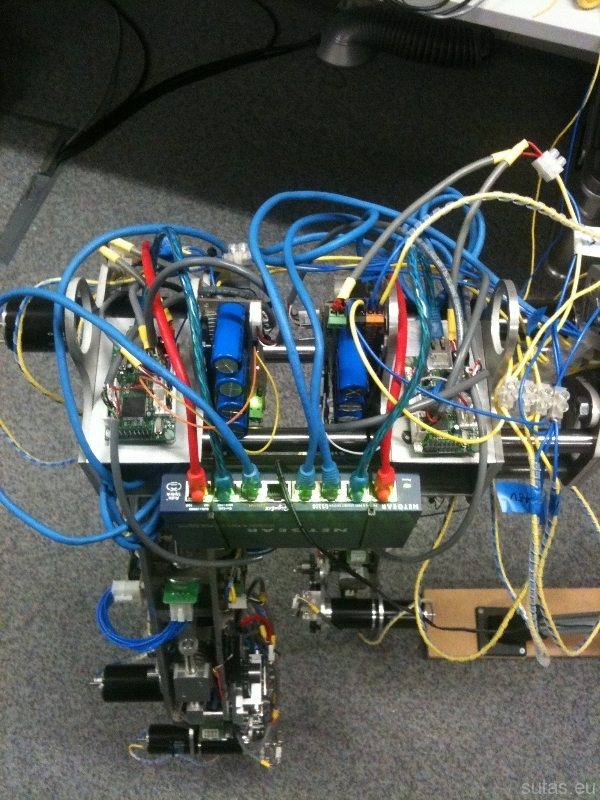
In this project I am responsible for the communications (both, hardware and software/firmware) and most of the electronics (e.g. control boards, custom motor drivers).
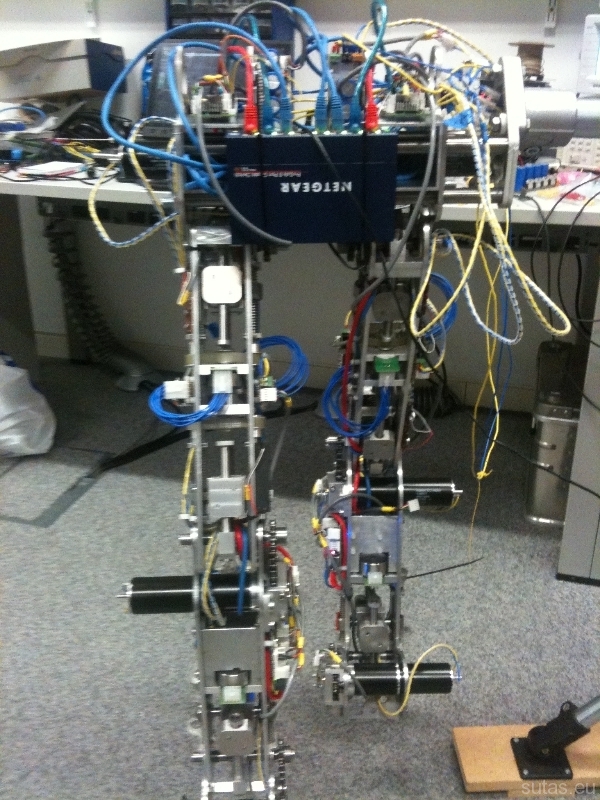
Unfortunately, I am not able to share any source code or technical details about it, but in the meantime here is what I can say: the control boards are powered by an at91sam7 series uC, using Ethernet technology with a custom protocol for fully deterministic communications (i.e. communications are designed in a way that frame collisions can not occur) . Everything runs in real-time using linux-rt kernel on fit-pc2i box.
By now it already has walked (limped?) about two kilometers without any technical difficulties!
Like what you read? Want to be notified of new content? Let’s connect:![]()
